Basic code to test a rotary encoder connection on Teensy
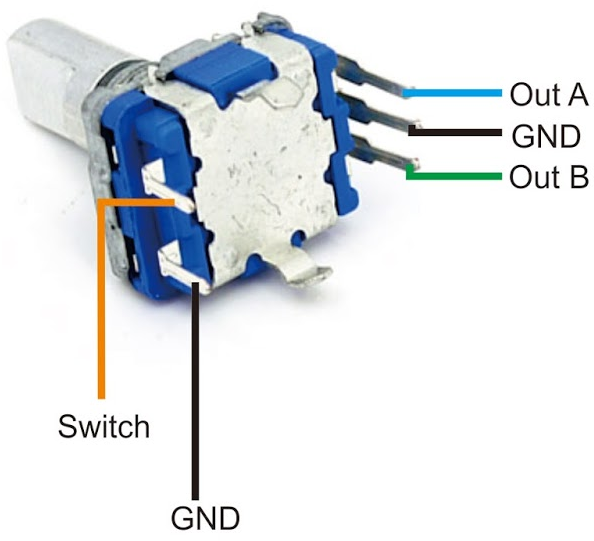
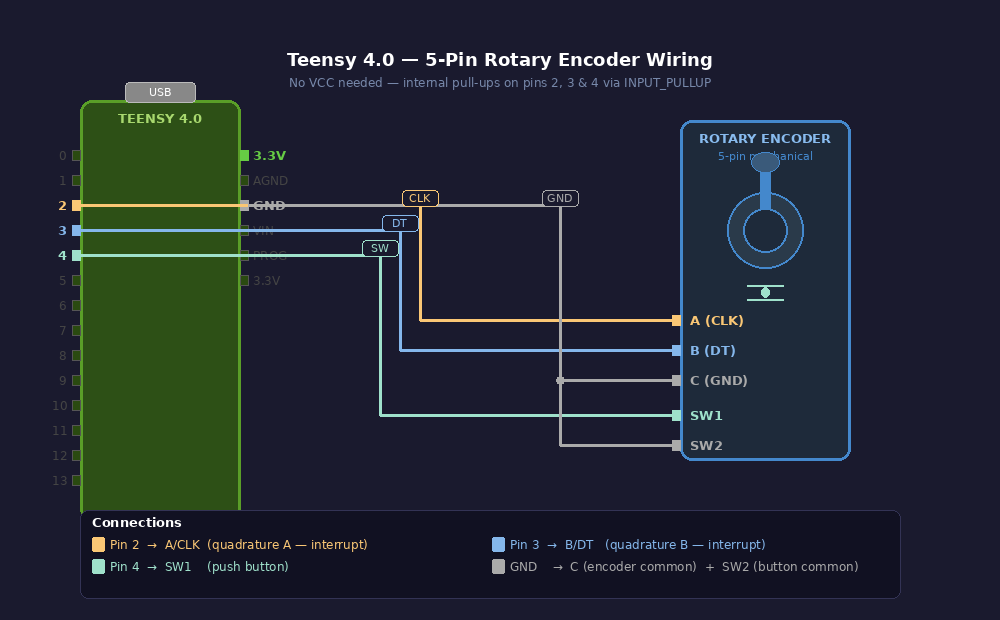
Wiring
Test code:
// Rotary Encoder Test — Teensy 4.0
// 5-pin mechanical encoder (no module board)
// Wiring: A->Pin2, B->Pin3, C->GND, SW1->Pin4, SW2->GND
#include <Encoder.h>
Encoder myEnc(2, 3);
const int SW_PIN = 4;
long lastPosition = 0;
bool lastButtonState = HIGH;
void setup() {
Serial.begin(115200);
while (!Serial && millis() < 3000);
// Enable internal pull-ups on all three signal pins
pinMode(2, INPUT_PULLUP);
pinMode(3, INPUT_PULLUP);
pinMode(SW_PIN, INPUT_PULLUP);
Serial.println("Rotary Encoder Test — Teensy 4.0");
Serial.println("Rotate the knob and press the button.");
Serial.println("-----------------------------------");
}
void loop() {
// --- Read encoder position ---
long newPosition = myEnc.read();
if (newPosition != lastPosition) {
int delta = newPosition - lastPosition;
Serial.print("Position: ");
Serial.print(newPosition / 4);
Serial.print(" (raw: ");
Serial.print(newPosition);
Serial.print(") Direction: ");
Serial.println(delta > 0 ? "CW ▶" : "CCW ◀");
lastPosition = newPosition;
}
// --- Read button ---
bool buttonState = digitalRead(SW_PIN);
if (buttonState == LOW && lastButtonState == HIGH) {
Serial.println(">>> Button pressed! Resetting position to 0.");
myEnc.write(0);
lastPosition = 0;
delay(50);
}
lastButtonState = buttonState;
}